")
")
Donnerstag, 11. Mai 2023 · 3 Wörter · 31 Zeichen
Vollautomatisiert und fahrerlos
UNICARagil zeigt, wie fahrerloses Fahren im gemischten Verkehr sicher funktionieren kann
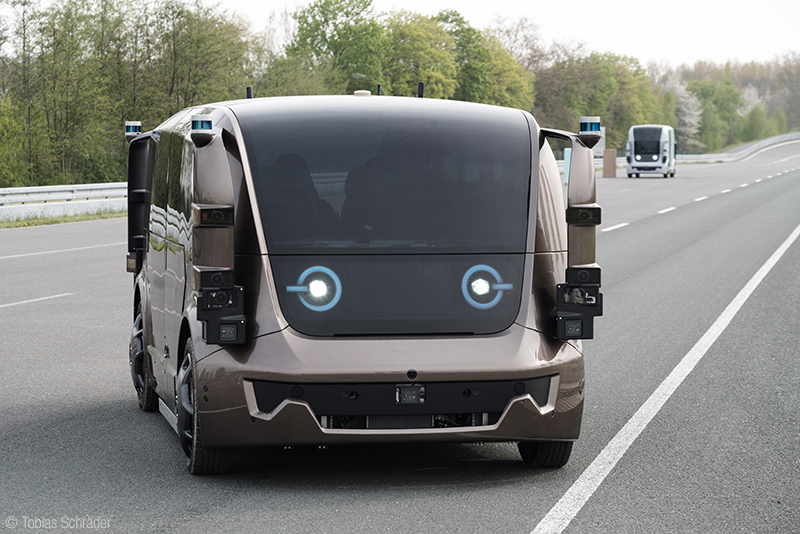
- Abschlussevent eines der größten Forschungsprojekte zum autonomen Fahren präsentiert 4 vollständig fahrerlose Fahrzeugprototypen,
- Universitätsübergreifendes Konsortium entwickelt in 5 Jahren vollständig neue Architektur, Konzepte und Software für fahrerlose Fahrzeuge.
Nach fünf Jahren intensiver Arbeit präsentieren heute 8 Universitäten und 9 Unternehmen der Öffentlichkeit den großen Wurf. Vier vollständig autonome Fahrzeugprototypen zeigen nun, wie zukünftige Mobilität gelingen kann und gleichzeitig komplexe Aufgaben aus dem individuellen und öffentlichen Verkehr sowie des Gütertransports erfüllen kann.
Bei der Bewältigung der Herausforderungen, die sich aus einem steigenden Mobilitätsbedarf und der fortschreitenden Urbanisierung ergeben, werden automatisierte und vernetzte Fahrzeuge eine Schlüsselrolle einnehmen. Sie schaffen die Grundlage für einen nachhaltigen und intelligenten Straßenverkehr, neuartige Mobilitäts- und Transportkonzepte sowie Verbesserungen der Verkehrssicherheit und Lebensqualität im urbanen und ländlichen Raum.
Dafür geeignete Fahrzeugkonzepte erfordern jedoch eine wesentlich leistungsfähigere und updatefähige Informationsverarbeitung im Kraftfahrzeug und damit eine Revolution etablierter Architekturen und Entwicklungsprozesse. Die in der Automobilindustrie vorherrschende Vorgehensweise der evolutionären Weiterentwicklung bestehender Systeme und Konzepte wird aufgrund zahlreicher Abhängigkeiten zwischen Hardware und Software nur begrenzt Erfolg haben können.
Daher wurde im Rahmen des vom BMBF mit rund 32 Millionen Euro geförderten Projekts UNICARagil das Fahrzeug, seine Entwicklung und die darunterliegenden Architekturen revolutionär neu gedacht.
„Wissenschaft muss Bekanntes in Frage stellen und neues Wissen schaffen – das sind im Grunde unsere Kernaufgaben und einer der Eckpfeiler unseres Wissenschaftsstandorts Deutschland“, sagt Prof. Lutz Eckstein, Leiter des ika und Gesamtkoordinator des Projektes. „Daher haben wir uns universitätsübergreifend der Aufgabe gestellt, eine agil updatefähige und erweiterbare Architektur für fahrerlose Fahrzeuge zu schaffen. Dies wollen wir mit dem Projekt UNICARagil auf erlebbare und überzeugende Weise erreichen.“
Ziel des Projekts war deshalb, durch die Kooperation führender deutscher Universitäten im Bereich automatisiertes Fahren mit spezialisierten Unternehmen die Grundlagen für ein nutzerzentriertes und an den menschlichen Fähigkeiten orientiertes Konzept des fahrerlosen Fahrens zu schaffen. Deshalb wurde bewusst darauf verzichtet, aktuelle Fahrzeuge umzubauen oder zu erweitern. „Aktuelle Fahrzeuge stellen Antworten auf ganz andere Anforderungen dar, sie sind auf den Menschen als Fahrzeugführer ausgerichtet. Jetzt einfach nur das Lenkrad auszubauen und in den so freigewordenen Platz eine Lenk- und Steuerautomatik einzubauen, schafft nur bedingt einen Mehrwert. Mit der Möglichkeit der Automatisierung können wir auch das Auto an sich neu denken“, sagt Timo Woopen, Projektleiter von UNICARagil.
Daher hat das Projektkonsortium zunächst einmal eine komplett neue Fahrzeugstruktur ohne die Altlasten aktueller Fahrzeuge entwickelt. Herkömmliche Fahrzeuge bestehen grundsätzlich aus einem Fahrwerk, einem Antrieb und einer Karosserie. In UNICARagil wurden nun das Fahrwerk mit dem Antrieb „verheiratet“ und in vier Dynamikmodulen zusammengefasst, die jeweils ein einzelnes Rad antreiben, führen, lenken und bremsen. Verbunden werden diese Module miteinander über eine Fahrplattform, die dank der neuartigen Radführung auch alle Räder um 90° einlenken kann und so auch einfach seitlich in kleinste Parklücken passt. Entsprechend der intendierten Nutzung von Fahrzeugen können individuelle Kabinen auf die Fahrplattform gesetzt werden. Dieses Baukastenprinzip erlaubt eine maximale Flexibilität bei der Innenraumgestaltung bei minimalem Entwicklungsaufwand für eine zukünftige Serienproduktion.
Um Fahrzeuge sinnvoll zu automatisieren, bedarf es nicht nur vielfältiger Sensor-Technologien, sondern auch einer modularen Steuerungs-Intelligenz. Neben der Entwicklung generischer Sensormodule lagen weitere Forschungsschwerpunkte auf der Umfeld-Erkennung, einer flexibel erweiterbaren und update-fähigen Software- und Hardware-Struktur und natürlich der Vernetzung und Absicherung all dieser Elemente. So wie das menschlichen Gehirn bei z.B. kleineren Verletzungen Aufgaben auf andere Hirnareale überträgt, basieren die UNICARagil-Prototypen auch nicht auf einem zentralen Rechner. Deshalb wurde eine Rechnerarchitektur gewählt, die auf mehreren Ebenen arbeitet, dazu das sogenannte Großhirn mit dem Stammhirn und den Dynamikmodulen vernetzt und alle anfallenden Aufgaben mehrfach absichert. Die Dienste-orientierte Software-Architektur erlaubt agile Updates, die zur Laufzeit integriert werden. Die funktionale Architektur umfasst zusätzlich eine Cloud, in der das eigentliche Lernen aus „Erfahrung“ stattfindet, die Straßeninfrastruktur wie z.B. Sensoren an Ampeln und sogenannte „Info-Bienen“, worunter kleine automatisierte Luftfahrzeuge verstanden werden. Die Vernetzung zwischen diesen Bausteinen ermöglicht es den Fahrzeugen, auch in unübersichtlichen Verkehrsituationen vorausschauend und sicher mit herkömmlichen Pkw und Nkw zu interagieren.
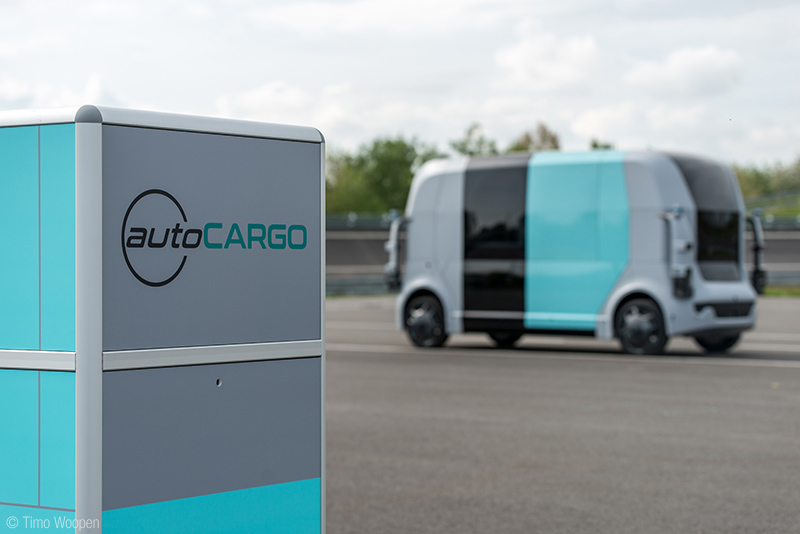
Die Flexibilität der vier fahrerlosen Fahrzeugprototypen demonstriert das Konsortium heute beim öffentlichen Abschlussevent anhand unterschiedlicher Anwendungen: Das autoCARGO zeigt die vollautomatische Paketauslieferung, das autoTAXI, wie individuelle Motto-Taxis in Zukunft private oder geschäftliche Meetings während der Fahrt zum Bahnhof ermöglichen können. Das autoSHUTTLE stellt eine flexible Ergänzung des ÖPNV dar, indem es gerade auf nicht so stark nachgefragten Strecken im ländlichen Raum fährt, und das Fahrzeugmodell autoELF thematisiert ein privates und individuell gestaltbares Familienfahrzeug. Die zahlreichen Besucherinnen und Besucher hatten die einzigartige Möglichkeit, mitzufahren und zu erleben, wie sich eine vollautomatisierte fahrerlose Fahrt im städtischen Mischverkehr anfühlt.
Seit dem Projektstart im Februar 2018 forschten über 100 Projektmitarbeiterinnen und -mitarbeiter von 15 Lehrstühlen und neun Unternehmen an diesen innovativen Konzepten für fahrerlose Fahrzeuge und deren Umsetzung. Die Orchestrierung der verschiedenen Kompetenzen der kooperierenden Projektpartner hat maßgeblich dazu beigetragen, die komplexen Fragestellungen des fahrerlosen Fahrens aus verschiedenen Perspektiven zu betrachten und so neue interdisziplinäre Lösungsansätze zu identifizieren und umzusetzen.
Die Abschlusspräsentation der vier Fahrzeugprototypen sowie des automatisierten Luftfahrzeugs auf dem Aldenhoven Test Center heute stellt für alle Beteiligten einen wichtigen Meilenstein dar, denn so richtig vorbei ist das Projekt damit nicht. Einerseits wurden und werden die Forschungsergebnisse auf zahlreichen Tagungen präsentiert und veröffentlicht, andererseits bilden die Erkenntnisse dieses Projekts eine wertvolle Basis, auf der Fahrzeughersteller und andere Unternehmen aufbauen können. Ebenso startete bereits das Folgeprojekt AUTOtech.agil, das nicht nur noch offene Fragen der Soft- und Hardware-Architektur adressiert, sondern die Grundlage für ein innovatives und intelligentes Mobilitätssystem schafft. Die Zukunft hat damit bereits begonnen..
Allgemeine Projektdaten:
Name: UNICARagil – Disruptive modulare Architektur für agile, automatisierte Fahrzeugkonzepte
Projektlaufzeit: 02/2018 – 05/2023
Fördersumme: 32 Mio. € Förderanteil BMBF, inklusive Projektpauschalen
Fördergeber: Bundesministerium für Bildung und Forschung (BMBF)
Projektträger: VDI/VDE/IT
Gesamtkoordinator: Prof. Dr. Lutz Eckstein, Institut für Kraftfahrzeuge, RWTH Aachen
Projektleiter: Timo Woopen, Institut für Kraftfahrzeuge, RWTH Aachen
Projektpartner:
- RWTH Aachen University (Institut für Kraftfahrzeuge, Lehrstuhl Informatik 11 - Embedded Software, Lehrstuhl und Institut für Flugsystemdynamik, Lehrstuhl für Controlling),
- TU Braunschweig (Institut für Regelungstechnik, Institut für Datentechnik und Kommunikationsnetze),
- TU Darmstadt (Fachgebiet Fahrzeugtechnik, Fachgebiet Physikalische Geodäsie und Satellitengeodäsie),
- TU München (Lehrstuhl für Ergonomie, Lehrstuhl für Fahrzeugtechnik),
- Universität Stuttgart (Institut für Fahrzeugtechnik),
- Universität Ulm (Institut für Mess-, Regel- und Mikrotechnik),
- Karlsruher Institut für Technologie (Institut für Mess- und Regelungstechnik, Institut für Fördertechnik und Logistiksysteme),
- Universität Passau (Lehrstuhl für Technische Informatik)
- Atlatec GmbH (wurde mittlerweile durch die Robert Bosch GmbH übernommen),
- flyXdrive GmbH,
- iMAR Navigation GmbH
- IPG Automotive GmbH
- Schaeffler Technologies AG & Co. KG
- VIRES Simulationstechnologie GmbH
Assoziierte Partner:
- Maxion Wheels Holding GmbH
- Valeo Schalter und Sensoren GmbH
- Thinking Cars GmbH
Projektbeirat:
- Deutsche Bahn AG
- BITO Lagertechnik
- BASt
- Continental
- e-mobil BW GmbH
- Ibeo Automotive Systems GmbH
- NOKIA
- NXP Semiconductors N.V.
- Robert Bosch GmbH
- SICK AG
Über das Institut für Kraftfahrzeuge (ika) der RWTH Aachen University
Das Institut für Kraftfahrzeuge (ika) beforscht als Teil der RWTH Aachen University das Gesamtfahrzeug einschließlich seiner Systeme und deren Wechselwirkungen. Von der Idee über innovative Komponenten- und Systemkonzepte bis hin zum Fahrzeugprototypen gestalten die Mitarbeiterinnen und Mitarbeiter des Institutes das Fahrzeug der Zukunft. Das ika leistet sowohl in öffentlichen Projekten als auch in Kooperation mit Automobilherstellern und -zulieferern einen anerkannten Beitrag zur Lösung aktueller und zukünftiger Herausforderungen.
Grundlage der intensiven Forschungsarbeiten für große Teile der Automobilindustrie sowie öffentliche Fördermittelgeber auf EU-, Bundes- und Landesebene stellt die umfangreiche Infrastruktur des ika dar, welche von Antriebs-, Batterie-, Fahrwerks- und Reifenprüfständen über akustische, thermodynamische und servo-hydraulische Prüfeinrichtungen bis hin zu einer Gesamtfahrzeug-Crashanlage sowie Teststrecken einschließlich modernster Messtechnik reicht. Hinzu kommt eine aktuelle Soft- und Hardwareausstattung für alle erforderlichen Simulationsdisziplinen. Das ika beschäftigt rund 120 festangestellte Mitarbeiterinnen und Mitarbeiter sowie mehr als 80 studentische Hilfskräfte. Zusätzlich entstehen permanent ca. 100 studentische Arbeiten im Rahmen der Forschung und Entwicklung.
Zur Veröffentlichung freigegeben. Bei Abdruck Belegexemplar erbeten. Bei Rückfragen oder Wunsch nach weiterem Material wenden Sie sich bitte an Ihre Ansprechpartner.
Pressekontakt
Institut für Kraftfahrzeuge, RWTH Aachen University
Steinbachstraße 7
52074 Aachen
Nikola Druce M.A.
Leiterin PR/Medien
+49 241 80-25668
Ansprechpartner*in
Dr.-Ing. Timo Woopen
Leiter Fahrzeugintelligenz & Automatisiertes Fahren
+49 241 80-23549
E-Mail
Download
PDF der Pressemitteilung herunterladen.
Pressemitteilung inkl. Bilder als ZIP-Datei herunterladen.
Link
interne Projektwebseite
Bilder des Final Events














und 12 weitere Bilder
Bilder aller Autos





und 3 weitere Bilder
Bilder autoCARGO





und 4 weitere Bilder
Bilder autoELF



und 2 weitere Bilder
Bilder autoSHUTTLE




und 2 weitere Bilder
Bilder autoTAXI






und 6 weitere Bilder
Videos aller Autos
Unter diesem Link finden Sie einen Dowload der Videos zu allen vier UNICARagil-Fahrzeugen. (verfügbar bis 22.05.2023)
Eine Playlist zu allen vier Videos über die UNICARagil-Fahrzeuge ist bei Youtube zu finden.
Projektleiter
Timo Woopen M.Sc.
+49 241 80 23549
E-Mail
Gefördert duch
![[Logo: BM Bildung und Forschung]](/images/foerderer/bmbf-de.svg)
Service
Kooperationen
Adresse
Institut für Kraftfahrzeuge
RWTH Aachen University
Steinbachstraße 7
52074 Aachen · Deutschland
Address
Institute for Automotive Engineering (ika)
RWTH Aachen University
Steinbachstraße 7
52074 Aachen · Germany